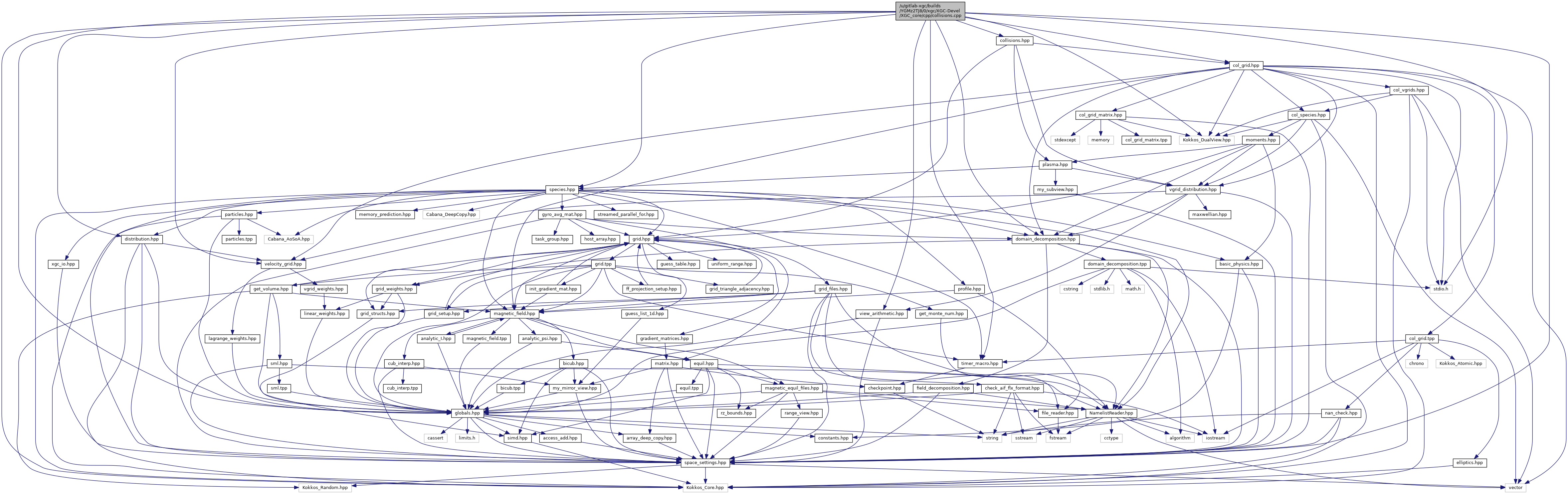
#include <stdio.h>#include <Kokkos_Core.hpp>#include <Kokkos_DualView.hpp>#include "timer_macro.hpp"#include "space_settings.hpp"#include "globals.hpp"#include "species.hpp"#include "domain_decomposition.hpp"#include "distribution.hpp"#include "col_grid.hpp"#include "velocity_grid.hpp"#include "view_arithmetic.hpp"#include "async_reassignment.hpp"#include "collisions.hpp"
Include dependency graph for collisions.cpp:
Functions | |
| void | set_f0_node_cost_as_updated () |
| void | count_converged (const View< int *, CLayout, HostType > &converged_all, int &converged, int &unconverged) |
| void | reduce_converged_all (const DomainDecomposition< DeviceType > &pol_decomp, View< int *, CLayout, HostType > &converged_all, bool axisym_parallelization) |
| void | reduce_col_timing_all (const DomainDecomposition< DeviceType > &pol_decomp, const View< float *, CLayout, HostType > &col_timing_all, bool axisym_parallelization) |
| void | report_convergence (const Grid< DeviceType > &grid, const DomainDecomposition< DeviceType > &pol_decomp, const View< int *, CLayout, HostType > &converged_all, bool axisym_parallelization) |
| void | collisions_diagnostic (const Grid< DeviceType > &grid, const DomainDecomposition< DeviceType > &pol_decomp, const XGC_IO_Stream &stream, const View< int *, CLayout, HostType > &converged_all, int max_n_subcycles, const View< int *, CLayout, HostType > n_subcycles_all) |
| void | reduce_collisions_result (const DomainDecomposition< DeviceType > &pol_decomp, VGridDistribution< HostType > &df0g_tmp, bool axisym_parallelization) |
| void | mpi_split_assignments (const DomainDecomposition< DeviceType > &pol_decomp, bool symmetric_f, VertexList &assigned) |
| void | unassign_completed (const View< int *, CLayout, HostType > n_subcycles, const View< int *, CLayout, HostType > &converged, int i_subcycle, VertexList &assigned) |
| void | adjust_subcycling (const CollisionGrid< DeviceType > &col_grid, const View< int *, CLayout, HostType > &converged_all) |
| void | subcycle_collisions (const CollisionGrid< DeviceType > &col_grid, const CollisionSpecies< DeviceType > &col_spall, double dt, const View< int *, CLayout, HostType > &n_subcycles_local, VertexList &assigned, const View< int *, CLayout, HostType > &converged_local, const VGridDistribution< HostType > &df0g_tmp, const View< double *, CLayout, HostType > &node_cost) |
| void | collisions (const Grid< DeviceType > &grid, const DomainDecomposition< DeviceType > &pol_decomp, const VelocityGrid &vgrid, Plasma &plasma, const Moments &moments, const CollisionGrid< DeviceType > &col_grid, double dt, bool symmetric_f, const VGridDistribution< DeviceType > &f0_f, const VGridDistribution< DeviceType > &f0_df0g_cumul, const View< double *, CLayout, HostType > &node_cost, int gstep, DiagF0DF &diag_f0_df) |
Function Documentation
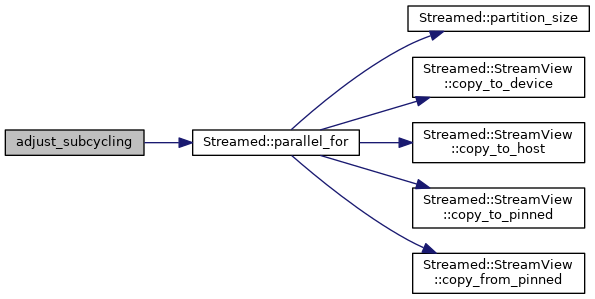
◆ adjust_subcycling()
| void adjust_subcycling | ( | const CollisionGrid< DeviceType > & | col_grid, |
| const View< int *, CLayout, HostType > & | converged_all | ||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

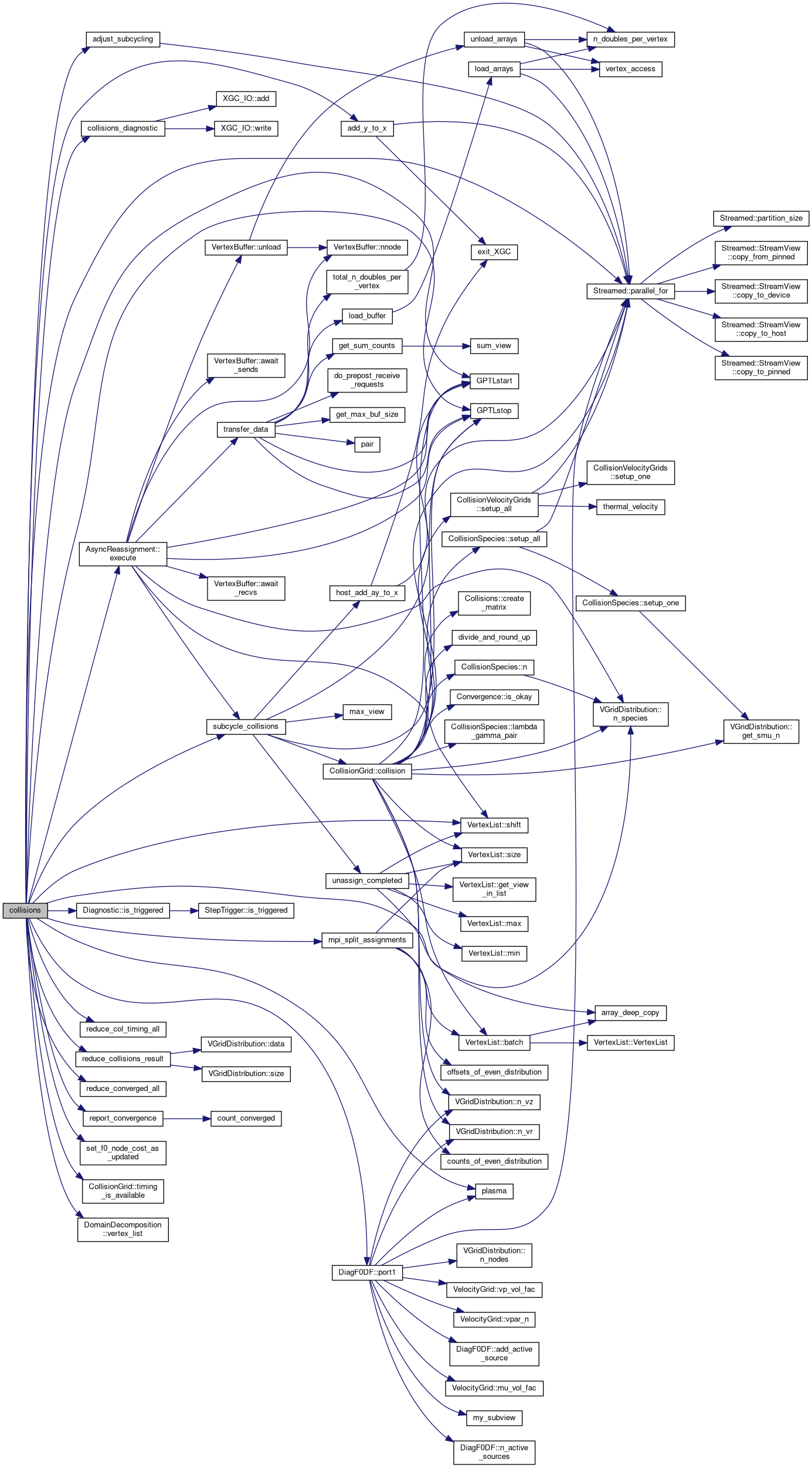
◆ collisions()
| void collisions | ( | const Grid< DeviceType > & | grid, |
| const DomainDecomposition< DeviceType > & | pol_decomp, | ||
| const VelocityGrid & | vgrid, | ||
| Plasma & | plasma, | ||
| const Moments & | moments, | ||
| const CollisionGrid< DeviceType > & | col_grid, | ||
| double | dt, | ||
| bool | symmetric_f, | ||
| const VGridDistribution< DeviceType > & | f0_f, | ||
| const VGridDistribution< DeviceType > & | f0_df0g_cumul, | ||
| const View< double *, CLayout, HostType > & | node_cost, | ||
| int | gstep, | ||
| DiagF0DF & | diag_f0_df | ||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

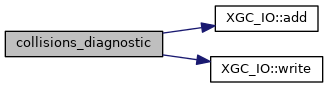
◆ collisions_diagnostic()
| void collisions_diagnostic | ( | const Grid< DeviceType > & | grid, |
| const DomainDecomposition< DeviceType > & | pol_decomp, | ||
| const XGC_IO_Stream & | stream, | ||
| const View< int *, CLayout, HostType > & | converged_all, | ||
| int | max_n_subcycles, | ||
| const View< int *, CLayout, HostType > | n_subcycles_all | ||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

◆ count_converged()
| void count_converged | ( | const View< int *, CLayout, HostType > & | converged_all, |
| int & | converged, | ||
| int & | unconverged | ||
| ) |
Here is the caller graph for this function:

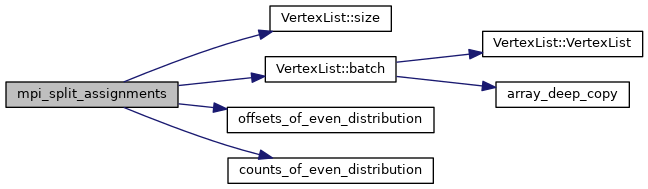
◆ mpi_split_assignments()
| void mpi_split_assignments | ( | const DomainDecomposition< DeviceType > & | pol_decomp, |
| bool | symmetric_f, | ||
| VertexList & | assigned | ||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

◆ reduce_col_timing_all()
| void reduce_col_timing_all | ( | const DomainDecomposition< DeviceType > & | pol_decomp, |
| const View< float *, CLayout, HostType > & | col_timing_all, | ||
| bool | axisym_parallelization | ||
| ) |
Here is the caller graph for this function:

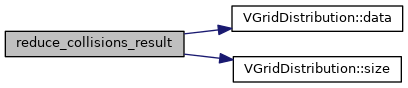
◆ reduce_collisions_result()
| void reduce_collisions_result | ( | const DomainDecomposition< DeviceType > & | pol_decomp, |
| VGridDistribution< HostType > & | df0g_tmp, | ||
| bool | axisym_parallelization | ||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

◆ reduce_converged_all()
| void reduce_converged_all | ( | const DomainDecomposition< DeviceType > & | pol_decomp, |
| View< int *, CLayout, HostType > & | converged_all, | ||
| bool | axisym_parallelization | ||
| ) |
Here is the caller graph for this function:

◆ report_convergence()
| void report_convergence | ( | const Grid< DeviceType > & | grid, |
| const DomainDecomposition< DeviceType > & | pol_decomp, | ||
| const View< int *, CLayout, HostType > & | converged_all, | ||
| bool | axisym_parallelization | ||
| ) |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ set_f0_node_cost_as_updated()
| void set_f0_node_cost_as_updated | ( | ) |
Here is the caller graph for this function:

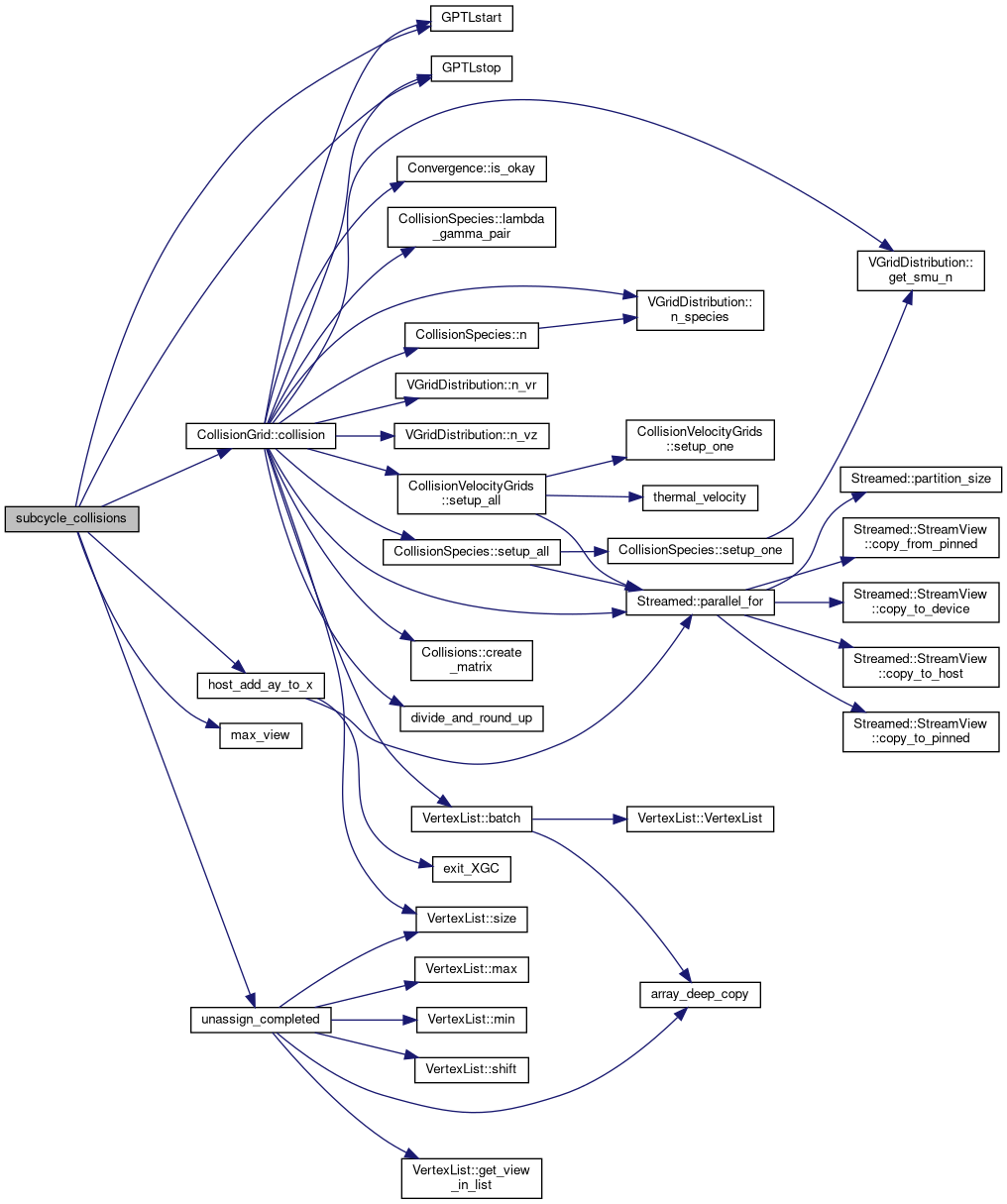
◆ subcycle_collisions()
| void subcycle_collisions | ( | const CollisionGrid< DeviceType > & | col_grid, |
| const CollisionSpecies< DeviceType > & | col_spall, | ||
| double | dt, | ||
| const View< int *, CLayout, HostType > & | n_subcycles_local, | ||
| VertexList & | assigned, | ||
| const View< int *, CLayout, HostType > & | converged_local, | ||
| const VGridDistribution< HostType > & | df0g_tmp, | ||
| const View< double *, CLayout, HostType > & | node_cost | ||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

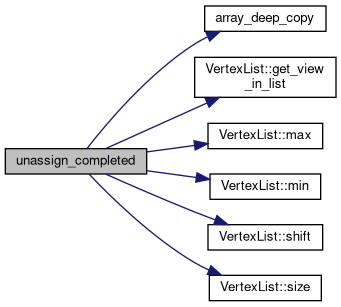
◆ unassign_completed()
| void unassign_completed | ( | const View< int *, CLayout, HostType > | n_subcycles, |
| const View< int *, CLayout, HostType > & | converged, | ||
| int | i_subcycle, | ||
| VertexList & | assigned | ||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:
