#include <col_vgrids.hpp>
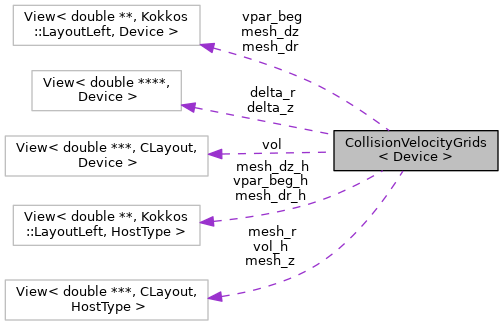
Collaboration diagram for CollisionVelocityGrids< Device >:
Public Member Functions | |
| Kokkos::DualView< int *, CLayout, Device > | count_species_in_grid (const CollisionSpecies< Device > &col_spall) const |
| int | count_grids () const |
| CollisionVelocityGrids () | |
| CollisionVelocityGrids (const CollisionSpecies< Device > &col_spall) | |
| KOKKOS_INLINE_FUNCTION double | vp_vol_fac (int ivz) const |
| void | setup_one (int isp, int mesh_ind, double vth, double dsmu, double dvp, double vp_max) |
| KOKKOS_INLINE_FUNCTION double | mesh_r (int ibatch, int igrid, int j) const |
| KOKKOS_INLINE_FUNCTION double | mesh_z (int ibatch, int igrid, int j) const |
| KOKKOS_INLINE_FUNCTION double | mesh_r_half (int ibatch, int igrid, int j) const |
| KOKKOS_INLINE_FUNCTION double | mesh_z_half (int ibatch, int igrid, int j) const |
| KOKKOS_INLINE_FUNCTION double | local_center_volume (int ibatch, int igrid, int j) const |
| void | setup_all (const CollisionSpecies< Device > &col_species, const View< int *, HostType > &mesh_nodes, int mb_n_nodes) |
Public Attributes | |
| Kokkos::DualView< int *, CLayout, Device > | nspecies_in_grid |
| const int | n |
| Number of velocity grids. More... | |
| const int | mb_n_nodes |
| Batch size. More... | |
| const int | n_species |
| Number of species total. More... | |
| const int | nvr |
| grid points in r More... | |
| const int | nvz |
| grid points in z More... | |
| View< double ***, CLayout, HostType > | mesh_r_h |
| View< double ***, CLayout, HostType > | mesh_z_h |
| View< double ***, CLayout, Device > | vol |
| View< double ***, CLayout, HostType > | vol_h |
| View< double ****, Device > | delta_r |
| View< double ****, Device > | delta_z |
| View< double **, Kokkos::LayoutLeft, HostType > | vpar_beg_h |
| View< double **, Kokkos::LayoutLeft, HostType > | mesh_dz_h |
| View< double **, Kokkos::LayoutLeft, HostType > | mesh_dr_h |
| View< double **, Kokkos::LayoutLeft, Device > | vpar_beg |
| View< double **, Kokkos::LayoutLeft, Device > | mesh_dz |
| View< double **, Kokkos::LayoutLeft, Device > | mesh_dr |
| Kokkos::DualView< int **, CLayout, Device > | map_grid_to_species |
Constructor & Destructor Documentation
◆ CollisionVelocityGrids() [1/2]
template<class Device >
|
inline |
◆ CollisionVelocityGrids() [2/2]
template<class Device >
|
inline |
Member Function Documentation
◆ count_grids()
template<class Device >
|
inline |
◆ count_species_in_grid()
template<class Device >
|
inline |
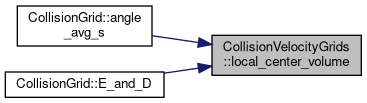
◆ local_center_volume()
template<class Device >
|
inline |
Here is the call graph for this function:

Here is the caller graph for this function:
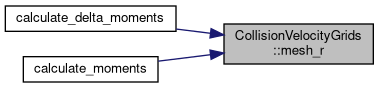
◆ mesh_r()
template<class Device >
|
inline |
Here is the caller graph for this function:
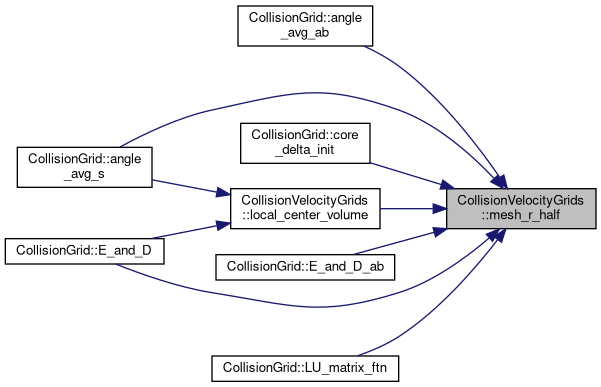
◆ mesh_r_half()
template<class Device >
|
inline |
Here is the caller graph for this function:
◆ mesh_z()
template<class Device >
|
inline |
Here is the caller graph for this function:
◆ mesh_z_half()
template<class Device >
|
inline |
Here is the caller graph for this function:
◆ setup_all()
template<class Device >
|
inline |
Here is the call graph for this function:
Here is the caller graph for this function:

◆ setup_one()
template<class Device >
|
inline |
Here is the caller graph for this function:

◆ vp_vol_fac()
template<class Device >
|
inline |
Get the boundary weighting factor of the velocity volume element in \(v_\parallel\) direction. The boundary weighting factor in \(v_\perp\) direction is already included in vol/vol_h. The return value is 1 for interior vertices, and 1/2 for boundary vertices.
- Parameters
-
[in] ivz Parallel velocity grid index (0...nvz-1)
- Returns
- vp_vol_fac Boundary weighting factor in \(v_\parallel\) for velocity integration
Here is the caller graph for this function:
Member Data Documentation
◆ delta_r
template<class Device >
| View<double****,Device> CollisionVelocityGrids< Device >::delta_r |
◆ delta_z
template<class Device >
| View<double****,Device> CollisionVelocityGrids< Device >::delta_z |
◆ map_grid_to_species
template<class Device >
| Kokkos::DualView<int**,CLayout,Device> CollisionVelocityGrids< Device >::map_grid_to_species |
◆ mb_n_nodes
template<class Device >
| const int CollisionVelocityGrids< Device >::mb_n_nodes |
Batch size.
◆ mesh_dr
template<class Device >
| View<double**,Kokkos::LayoutLeft,Device> CollisionVelocityGrids< Device >::mesh_dr |
◆ mesh_dr_h
template<class Device >
| View<double**,Kokkos::LayoutLeft,HostType> CollisionVelocityGrids< Device >::mesh_dr_h |
◆ mesh_dz
template<class Device >
| View<double**,Kokkos::LayoutLeft,Device> CollisionVelocityGrids< Device >::mesh_dz |
◆ mesh_dz_h
template<class Device >
| View<double**,Kokkos::LayoutLeft,HostType> CollisionVelocityGrids< Device >::mesh_dz_h |
◆ mesh_r_h
template<class Device >
| View<double***,CLayout,HostType> CollisionVelocityGrids< Device >::mesh_r_h |
◆ mesh_z_h
template<class Device >
| View<double***,CLayout,HostType> CollisionVelocityGrids< Device >::mesh_z_h |
◆ n
template<class Device >
| const int CollisionVelocityGrids< Device >::n |
Number of velocity grids.
◆ n_species
template<class Device >
| const int CollisionVelocityGrids< Device >::n_species |
Number of species total.
◆ nspecies_in_grid
template<class Device >
| Kokkos::DualView<int*,CLayout,Device> CollisionVelocityGrids< Device >::nspecies_in_grid |
◆ nvr
template<class Device >
| const int CollisionVelocityGrids< Device >::nvr |
grid points in r
◆ nvz
template<class Device >
| const int CollisionVelocityGrids< Device >::nvz |
grid points in z
◆ vol
template<class Device >
| View<double***,CLayout,Device> CollisionVelocityGrids< Device >::vol |
◆ vol_h
template<class Device >
| View<double***,CLayout,HostType> CollisionVelocityGrids< Device >::vol_h |
◆ vpar_beg
template<class Device >
| View<double**,Kokkos::LayoutLeft,Device> CollisionVelocityGrids< Device >::vpar_beg |
◆ vpar_beg_h
template<class Device >
| View<double**,Kokkos::LayoutLeft,HostType> CollisionVelocityGrids< Device >::vpar_beg_h |
The documentation for this struct was generated from the following file:
- /p/test_ssd/builds/t3_84szKM/0/xgc/XGC-Devel/XGC_core/cpp/col_vgrids.hpp