#include <col_species.hpp>
Collaboration diagram for CollisionSpecies< Device >:

Public Member Functions | |
| CollisionSpecies () | |
| CollisionSpecies (const Moments &moments_in, const VGridDistribution< DeviceType > &f_in, const std::vector< Species< Device >> &all_species, int mb_n_nodes) | |
| CollisionSpecies (const CollisionSpecies< Device > &col_spall_in, int nnode_in) | |
| void | setup_one (int isp, int mesh_ind, int local_node_ind) const |
| void | setup_all (Kokkos::View< int *, HostType > &mesh_nodes, int mb_n_nodes) const |
| void | lambda_gamma_pair (const View< double *, CLayout, HostType > &dt, Kokkos::View< double ***, Device > &gammac, int mb_n_nodes) const |
| int | n () const |
Public Attributes | |
| const VGridDistribution< HostType > | f |
| Kokkos::DualView< CollisionSpeciesScalars **, Device > | s |
| View< int *, CLayout, DeviceType > | grid_index_d |
| View< int *, CLayout, HostType > | grid_index_h |
| View< MomentSet **, CLayout, HostType > | moments |
| View< double **, CLayout, HostType > | conv_factor |
| View< int *, CLayout, HostType > | moments_index |
| View< double **, CLayout, HostType > | den_moment |
| View< double **, CLayout, HostType > | temp_moment |
| View< double *, CLayout, DeviceType > | inv_mass_d |
| std::vector< View< double *, CLayout, HostType > > | fg_temp_ev_all |
| View< double ****, CLayout, HostType > | pdf_h |
| View< double ****, CLayout, Device > | |
| View< double ****, CLayout, HostType > | pdf1_h |
| View< double ****, CLayout, Device > | pdf1 |
Constructor & Destructor Documentation
◆ CollisionSpecies() [1/3]
template<class Device >
|
inline |
◆ CollisionSpecies() [2/3]
template<class Device >
|
inline |
◆ CollisionSpecies() [3/3]
template<class Device >
|
inline |
Member Function Documentation
◆ lambda_gamma_pair()
template<class Device >
|
inline |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ n()
template<class Device >
|
inline |
Here is the call graph for this function:

Here is the caller graph for this function:

◆ setup_all()
template<class Device >
|
inline |
Here is the call graph for this function:
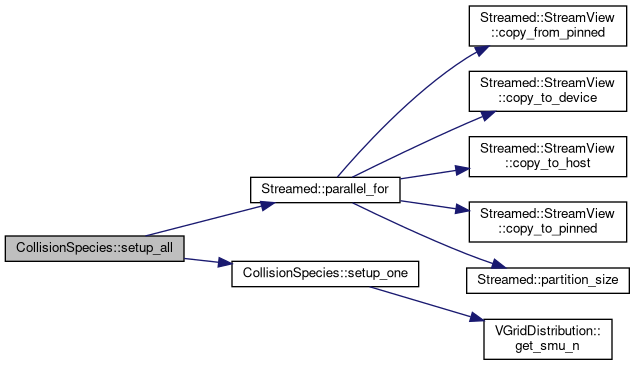
Here is the caller graph for this function:

◆ setup_one()
template<class Device >
|
inline |
Here is the call graph for this function:

Here is the caller graph for this function:

Member Data Documentation
◆ conv_factor
template<class Device >
| View<double**, CLayout, HostType> CollisionSpecies< Device >::conv_factor |
◆ den_moment
template<class Device >
| View<double**, CLayout, HostType> CollisionSpecies< Device >::den_moment |
◆ f
template<class Device >
| const VGridDistribution<HostType> CollisionSpecies< Device >::f |
◆ fg_temp_ev_all
template<class Device >
| std::vector<View<double*,CLayout,HostType> > CollisionSpecies< Device >::fg_temp_ev_all |
◆ grid_index_d
template<class Device >
| View<int*, CLayout, DeviceType> CollisionSpecies< Device >::grid_index_d |
◆ grid_index_h
template<class Device >
| View<int*, CLayout, HostType> CollisionSpecies< Device >::grid_index_h |
◆ inv_mass_d
template<class Device >
| View<double*,CLayout,DeviceType> CollisionSpecies< Device >::inv_mass_d |
◆ moments
template<class Device >
| View<MomentSet**, CLayout, HostType> CollisionSpecies< Device >::moments |
◆ moments_index
template<class Device >
| View<int*,CLayout,HostType> CollisionSpecies< Device >::moments_index |
template<class Device >
| View<double****,CLayout,Device> CollisionSpecies< Device >::pdf |
◆ pdf1
template<class Device >
| View<double****,CLayout,Device> CollisionSpecies< Device >::pdf1 |
◆ pdf1_h
template<class Device >
| View<double****,CLayout,HostType> CollisionSpecies< Device >::pdf1_h |
◆ pdf_h
template<class Device >
| View<double****,CLayout,HostType> CollisionSpecies< Device >::pdf_h |
◆ s
template<class Device >
| Kokkos::DualView<CollisionSpeciesScalars**,Device> CollisionSpecies< Device >::s |
◆ temp_moment
template<class Device >
| View<double**, CLayout, HostType> CollisionSpecies< Device >::temp_moment |
The documentation for this class was generated from the following file:
- /p/test_ssd/builds/t3_84szKM/0/xgc/XGC-Devel/XGC_core/cpp/col_species.hpp