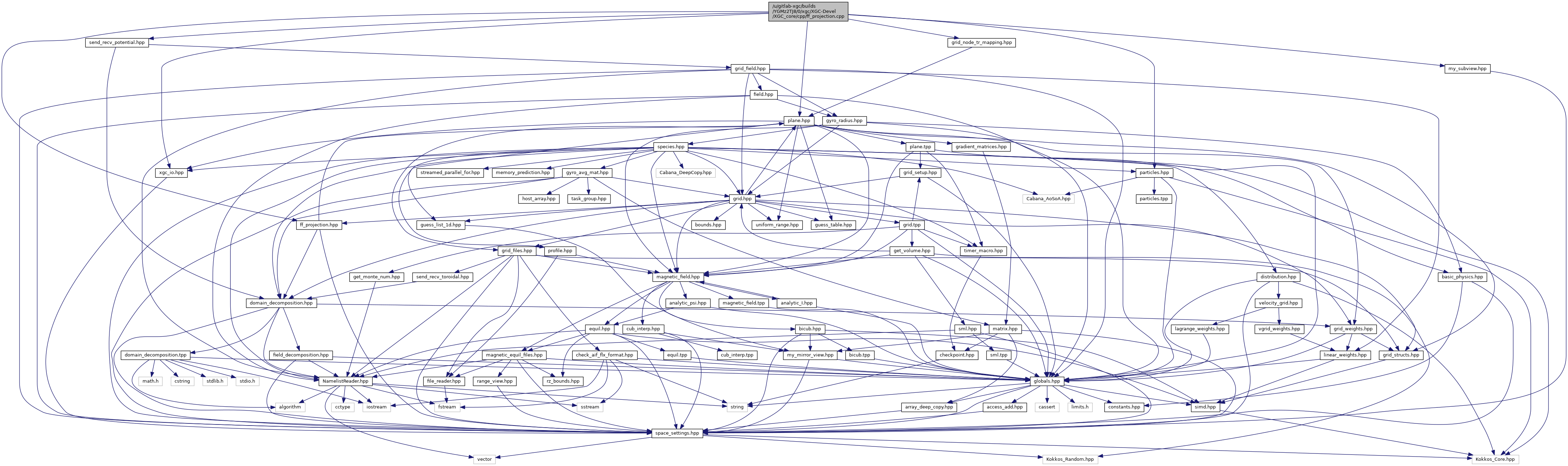
#include "plane.hpp"#include "grid_node_tr_mapping.hpp"#include "particles.hpp"#include "xgc_io.hpp"#include "my_subview.hpp"#include "send_recv_potential.hpp"#include "ff_projection.hpp"
Include dependency graph for ff_projection.cpp:
Functions | |
| KOKKOS_INLINE_FUNCTION void | use_nearest_triangle (const Plane< DeviceType > &plane, const View< int **, CLayout, DeviceType > &tr_node, const SimdVector2D &x, bool weight_p_on_boundary, int i_simd, Simd< int > &itr, SimdGridVec &p_loc) |
| void | project (const Plane< DeviceType > &plane_start, const Plane< DeviceType > &plane_dest, const MagneticField< DeviceType > &magnetic_field, const View< int **, CLayout, DeviceType > &tr_node, bool weight_p_on_boundary, const View< int *, CLayout, DeviceType > &tr_d, const View< int **, CLayout, DeviceType > &nd_d, const View< double **, CLayout, DeviceType > &p_d, const View< double *, CLayout, DeviceType > &dx_d, bool use_two_step_method) |
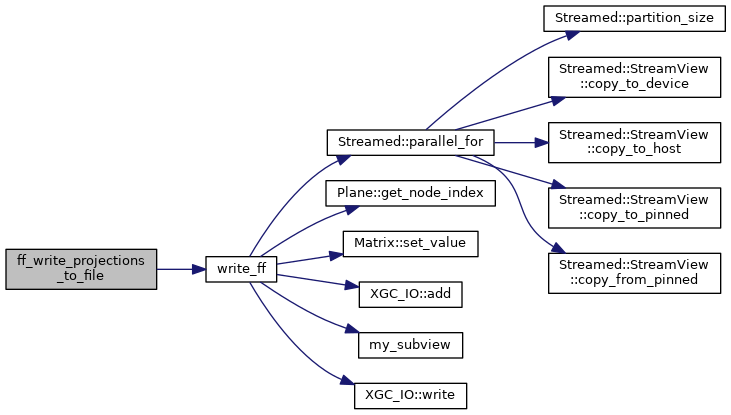
| static void | write_ff (const Plane< HostType > &plane_start, const Projection< HostType > &projection, const std::string stream_name, const std::string filename, bool reverse) |
| void | ff_write_projections_to_file (const Plane< HostType > &midplane, const Plane< HostType > &lplane, const Plane< HostType > &rplane, const Projection< HostType > &half_plane_ff, const Projection< HostType > &ff_lplane_to_neighbors, const Projection< HostType > &ff_to_midplane) |
| void | check_ff_property (const Projection< HostType > &projection, const std::string label) |
Function Documentation
◆ check_ff_property()
| void check_ff_property | ( | const Projection< HostType > & | projection, |
| const std::string | label | ||
| ) |
Here is the caller graph for this function:

◆ ff_write_projections_to_file()
| void ff_write_projections_to_file | ( | const Plane< HostType > & | midplane, |
| const Plane< HostType > & | lplane, | ||
| const Plane< HostType > & | rplane, | ||
| const Projection< HostType > & | half_plane_ff, | ||
| const Projection< HostType > & | ff_lplane_to_neighbors, | ||
| const Projection< HostType > & | ff_to_midplane | ||
| ) |
Here is the call graph for this function:
Here is the caller graph for this function:

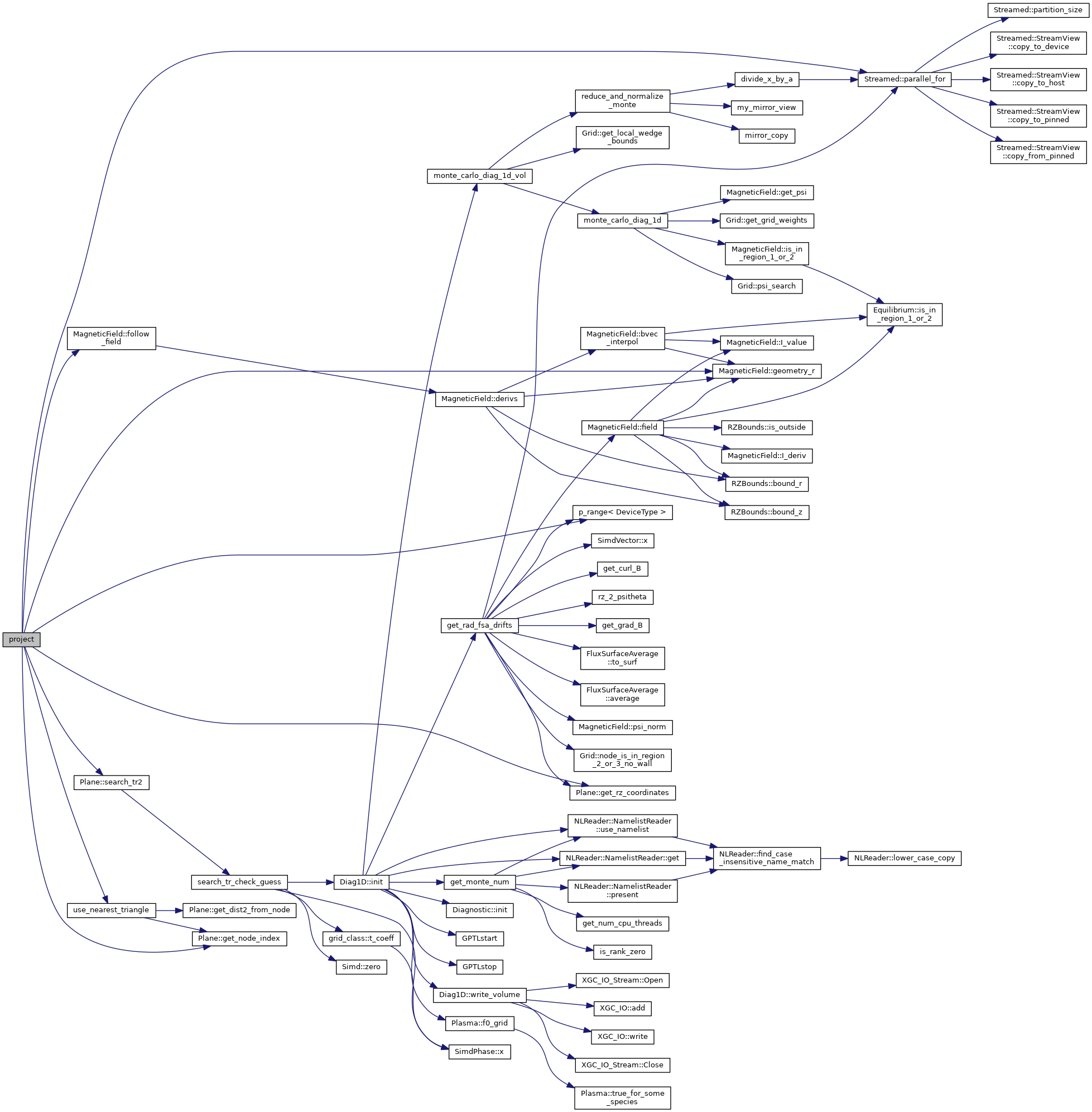
◆ project()
| void project | ( | const Plane< DeviceType > & | plane_start, |
| const Plane< DeviceType > & | plane_dest, | ||
| const MagneticField< DeviceType > & | magnetic_field, | ||
| const View< int **, CLayout, DeviceType > & | tr_node, | ||
| bool | weight_p_on_boundary, | ||
| const View< int *, CLayout, DeviceType > & | tr_d, | ||
| const View< int **, CLayout, DeviceType > & | nd_d, | ||
| const View< double **, CLayout, DeviceType > & | p_d, | ||
| const View< double *, CLayout, DeviceType > & | dx_d, | ||
| bool | use_two_step_method | ||
| ) |
Initialize the field-aligned mapping between adjacent planes. The routine traces magnetic field lines from each vertex of a plane in both toroidal directions to the adjacent mid-planes and full-step planes, records the triangle in which the field line intersects these planes and the corresponding interpolation weights.
- Parameters
-
[in] plane_start the plane being projected from [in] plane_dest the plane being projected to [in] magnetic_field the magnetic field for field following [in] tr_node the triangle-to-node mapping of the destination plane [in] weight_p_on_boundary whether to weight the nearest node if the projection falls outside the grid [out] tr_d the triangles on the destination plane [out] nd_d the nodes on the destination plane [out] p_d the barycentric weights on the destination plane [out] dx_d distance traveled along the field line [in] use_two_step_method whether to use an intermediate value to increase accuracy of dx
Here is the call graph for this function:
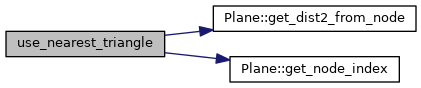
◆ use_nearest_triangle()
| KOKKOS_INLINE_FUNCTION void use_nearest_triangle | ( | const Plane< DeviceType > & | plane, |
| const View< int **, CLayout, DeviceType > & | tr_node, | ||
| const SimdVector2D & | x, | ||
| bool | weight_p_on_boundary, | ||
| int | i_simd, | ||
| Simd< int > & | itr, | ||
| SimdGridVec & | p_loc | ||
| ) |
Find the nearest triangle and use it. This algorithm loops over ALL nodes - very inefficient! Should use wall nodes - or last surface if no wall is present
- Parameters
-
[in] plane the plane [in] tr_node the triangle-to-node mapping of the plane [in] x the coordinates on the plane [in] weight_p_on_boundary whether to weight the nearest node if the projection falls outside the grid [in] i_simd the simd index since this is a vectorized operation [out] itr the index of the nearest triangle [out] p_loc the barycentric weights on the nearest triangle
Here is the call graph for this function:
Here is the caller graph for this function:

◆ write_ff()
|
static |
Here is the call graph for this function:
Here is the caller graph for this function:
