#include <ff_projection.hpp>
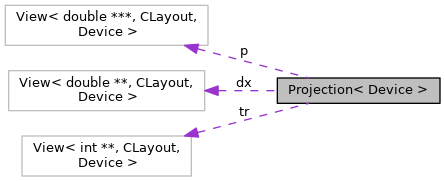
Collaboration diagram for Projection< Device >:
Public Types | |
| enum | Method { OneStep =0 , TwoSteps } |
Public Member Functions | |
| Projection () | |
| Projection (NLReader::NamelistReader &nlr, const MagneticField< DeviceType > &magnetic_field, Method method, bool node_based, const Plane< DeviceType > &plane_start0, const Plane< DeviceType > &plane_dest0, const View< int **, CLayout, DeviceType > &tr_node_dest0, const Plane< DeviceType > &plane_start1, const Plane< DeviceType > &plane_dest1, const View< int **, CLayout, DeviceType > &tr_node_dest1) | |
| template<class Device2 > | |
| Projection< Device2 > | mirror () const |
| Projection (const DomainDecomposition< DeviceType > &pol_decomp, const Projection< HostType > &proj_in, int iphi) | |
Public Attributes | |
| bool | node_based |
| View< int **, CLayout, Device > | tr |
| The triangles that are mapped to by the projection. One-indexed. More... | |
| View< int ***, CLayout, Device > | nd |
| The nodes of the three vertices of the triangles that are mapped to by the projection. Zero-indexed (!) More... | |
| View< double ***, CLayout, Device > | p |
| View< double **, CLayout, Device > | dx |
Friends | |
| template<class Device2 > | |
| class | Projection |
Member Enumeration Documentation
◆ Method
template<class Device >
| enum Projection::Method |
Constructor & Destructor Documentation
◆ Projection() [1/3]
template<class Device >
|
inline |
◆ Projection() [2/3]
template<class Device >
| Projection< Device >::Projection | ( | NLReader::NamelistReader & | nlr, |
| const MagneticField< DeviceType > & | magnetic_field, | ||
| Method | method, | ||
| bool | node_based, | ||
| const Plane< DeviceType > & | plane_start0, | ||
| const Plane< DeviceType > & | plane_dest0, | ||
| const View< int **, CLayout, DeviceType > & | tr_node_dest0, | ||
| const Plane< DeviceType > & | plane_start1, | ||
| const Plane< DeviceType > & | plane_dest1, | ||
| const View< int **, CLayout, DeviceType > & | tr_node_dest1 | ||
| ) |
◆ Projection() [3/3]
template<class Device >
| Projection< Device >::Projection | ( | const DomainDecomposition< DeviceType > & | pol_decomp, |
| const Projection< HostType > & | proj_in, | ||
| int | iphi | ||
| ) |
Member Function Documentation
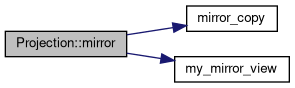
◆ mirror()
template<class Device >
template<class Device2 >
|
inline |
Here is the call graph for this function:
Friends And Related Function Documentation
◆ Projection
Member Data Documentation
◆ dx
template<class Device >
| View<double**,CLayout,Device> Projection< Device >::dx |
◆ nd
template<class Device >
| View<int***,CLayout,Device> Projection< Device >::nd |
The nodes of the three vertices of the triangles that are mapped to by the projection. Zero-indexed (!)
◆ node_based
template<class Device >
| bool Projection< Device >::node_based |
Whether to save triangle indices or node indices. The node-based method uses 3X more memory, but means that get_node_index doesn't need to be called when projecting; this means that the start plane is not needed.
◆ p
template<class Device >
| View<double***,CLayout,Device> Projection< Device >::p |
◆ tr
template<class Device >
| View<int**,CLayout,Device> Projection< Device >::tr |
The triangles that are mapped to by the projection. One-indexed.
The documentation for this struct was generated from the following file:
- /p/test_ssd/builds/t3_84szKM/0/xgc/XGC-Devel/XGC_core/cpp/ff_projection.hpp