#include <col_grid_matrix.hpp>
Inheritance diagram for Collisions::CSCMatrix< Device >:
Collaboration diagram for Collisions::CSCMatrix< Device >:
Public Types | |
| using | index_type = typename GridMatrix< Device >::index_type |
| using | value_type = typename GridMatrix< Device >::value_type |
| using | host_type = typename GridMatrix< Device >::host_type |
| using | device = typename GridMatrix< Device >::device |
| using | values_array_t = typename GridMatrix< Device >::values_array_t |
| using | const_values_array_t = typename GridMatrix< Device >::const_values_array_t |
| using | internal_values_array_t = Kokkos::DualView< value_type ***, Kokkos::LayoutRight, Device > |
| using | vector_view_t = typename GridMatrix< Device >::vector_view_t |
| using | const_vector_view_t = typename GridMatrix< Device >::const_vector_view_t |
| using | vector_h_view_t = typename GridMatrix< Device >::vector_h_view_t |
| using | const_vector_h_view_t = typename GridMatrix< Device >::const_vector_h_view_t |
| using | vector_dualview_t = typename GridMatrix< Device >::vector_dualview_t |
| using | const_vector_dualview_t = typename GridMatrix< Device >::const_vector_dualview_t |
 Public Types inherited from Collisions::GridMatrix< Device > Public Types inherited from Collisions::GridMatrix< Device > | |
| using | index_type = int |
| using | host_type = HostType |
| using | device = Device |
| using | value_type = double |
| using | values_array_t = Kokkos::View< value_type ***, Kokkos::LayoutRight, Device, Kokkos::MemoryTraits< Kokkos::Unmanaged > > |
| using | const_values_array_t = Kokkos::View< const value_type ***, Kokkos::LayoutRight, Device, Kokkos::MemoryTraits< Kokkos::Unmanaged > > |
| using | vector_view_t = Kokkos::View< value_type ****, Kokkos::LayoutRight, Device > |
| using | const_vector_view_t = Kokkos::View< const value_type ****, Kokkos::LayoutRight, Device > |
| using | vector_h_view_t = Kokkos::View< value_type ****, Kokkos::LayoutRight, host_type > |
| using | const_vector_h_view_t = Kokkos::View< const value_type ****, Kokkos::LayoutRight, host_type > |
| using | vector_dualview_t = Kokkos::DualView< value_type ****, Kokkos::LayoutRight, Device > |
| using | const_vector_dualview_t = Kokkos::DualView< const value_type ****, Kokkos::LayoutRight, Device > |
Public Member Functions | |
| CSCMatrix (size_type n_nodes, index_type num_species, int nvr, int nvz) | |
| const_values_array_t | get_const_values () const override |
| values_array_t | get_values () override |
| void | subtract_from_identity () override |
| void | add_identity_multiply (const_vector_view_t dist_col, vector_view_t dist_iter) const override |
| void | apply_solve (const_vector_h_view_t b_h, vector_h_view_t x_h, const_vector_view_t b, vector_view_t x) const override |
| Public Member Functions inherited from Collisions::GridMatrix< Device > | |
| GridMatrix (size_type n_nodes, int n_species) | |
| virtual | ~GridMatrix () |
| Kokkos::View< index_type **, device >::HostMirror | host_index_map_LU () |
| Kokkos::View< index_type **, device > | device_index_map_LU () const |
| index_type | get_num_nonzeros () const |
| index_type | get_num_rows () const |
Protected Member Functions | |
| void | setup_sparsity () |
Protected Attributes | |
| index_type | nvz_ |
| index_type | nvr_ |
| internal_values_array_t | values_ |
| Kokkos::View< index_type *, device > | central_locs_ |
| Kokkos::View< int *, host_type > | LU_rowindx_ |
| Kokkos::View< int *, host_type > | LU_colptr_ |
| Protected Attributes inherited from Collisions::GridMatrix< Device > | |
| Kokkos::DualView< index_type **, device > | index_map_ |
| const index_type | num_species_ |
| const index_type | num_nodes_ |
| const size_type | batch_size_ |
| index_type | num_rows_ |
| index_type | nnz_ |
Member Typedef Documentation
◆ const_values_array_t
template<typename Device >
| using Collisions::CSCMatrix< Device >::const_values_array_t = typename GridMatrix<Device>::const_values_array_t |
◆ const_vector_dualview_t
template<typename Device >
| using Collisions::CSCMatrix< Device >::const_vector_dualview_t = typename GridMatrix<Device>::const_vector_dualview_t |
◆ const_vector_h_view_t
template<typename Device >
| using Collisions::CSCMatrix< Device >::const_vector_h_view_t = typename GridMatrix<Device>::const_vector_h_view_t |
◆ const_vector_view_t
template<typename Device >
| using Collisions::CSCMatrix< Device >::const_vector_view_t = typename GridMatrix<Device>::const_vector_view_t |
◆ device
template<typename Device >
| using Collisions::CSCMatrix< Device >::device = typename GridMatrix<Device>::device |
◆ host_type
template<typename Device >
| using Collisions::CSCMatrix< Device >::host_type = typename GridMatrix<Device>::host_type |
◆ index_type
template<typename Device >
| using Collisions::CSCMatrix< Device >::index_type = typename GridMatrix<Device>::index_type |
◆ internal_values_array_t
template<typename Device >
| using Collisions::CSCMatrix< Device >::internal_values_array_t = Kokkos::DualView<value_type***, Kokkos::LayoutRight, Device> |
◆ value_type
template<typename Device >
| using Collisions::CSCMatrix< Device >::value_type = typename GridMatrix<Device>::value_type |
◆ values_array_t
template<typename Device >
| using Collisions::CSCMatrix< Device >::values_array_t = typename GridMatrix<Device>::values_array_t |
◆ vector_dualview_t
template<typename Device >
| using Collisions::CSCMatrix< Device >::vector_dualview_t = typename GridMatrix<Device>::vector_dualview_t |
◆ vector_h_view_t
template<typename Device >
| using Collisions::CSCMatrix< Device >::vector_h_view_t = typename GridMatrix<Device>::vector_h_view_t |
◆ vector_view_t
template<typename Device >
| using Collisions::CSCMatrix< Device >::vector_view_t = typename GridMatrix<Device>::vector_view_t |
Constructor & Destructor Documentation
◆ CSCMatrix()
template<typename Device >
|
inline |
Here is the call graph for this function:

Member Function Documentation
◆ add_identity_multiply()
template<typename Device >
|
overridevirtual |
◆ apply_solve()
template<typename Device >
|
overridevirtual |
◆ get_const_values()
template<typename Device >
|
overridevirtual |
Implements Collisions::GridMatrix< Device >.
◆ get_values()
template<typename Device >
|
overridevirtual |
Implements Collisions::GridMatrix< Device >.
◆ setup_sparsity()
template<typename Device >
|
protected |
Here is the call graph for this function:

Here is the caller graph for this function:

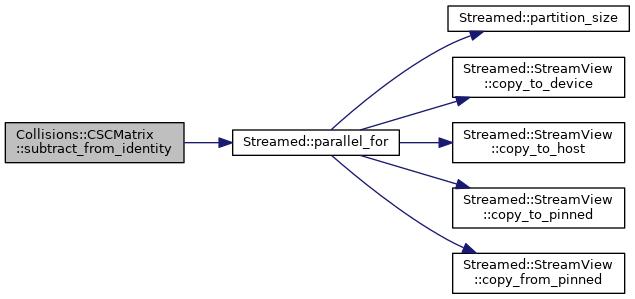
◆ subtract_from_identity()
template<typename Device >
|
overridevirtual |
Subtracts the matrix from the identity: M <- I - M.
- Warning
- The updated matrix values must be available on the host before calling this.
Implements Collisions::GridMatrix< Device >.
Here is the call graph for this function:
Member Data Documentation
◆ central_locs_
template<typename Device >
|
protected |
◆ LU_colptr_
template<typename Device >
|
protected |
◆ LU_rowindx_
template<typename Device >
|
protected |
◆ nvr_
template<typename Device >
|
protected |
◆ nvz_
template<typename Device >
|
protected |
◆ values_
template<typename Device >
|
protected |
The documentation for this class was generated from the following files:
- /p/test_ssd/builds/t3_84szKM/0/xgc/XGC-Devel/XGC_core/cpp/col_grid_matrix.hpp
- /p/test_ssd/builds/t3_84szKM/0/xgc/XGC-Devel/XGC_core/cpp/col_grid_matrix.cpp