#include <current_drive.hpp>
|
| | CurrentDrive () |
| |
| | CurrentDrive (NLReader::NamelistReader &nlr, const Grid< DeviceType > &grid, const MagneticField< DeviceType > &magnetic_field) |
| |
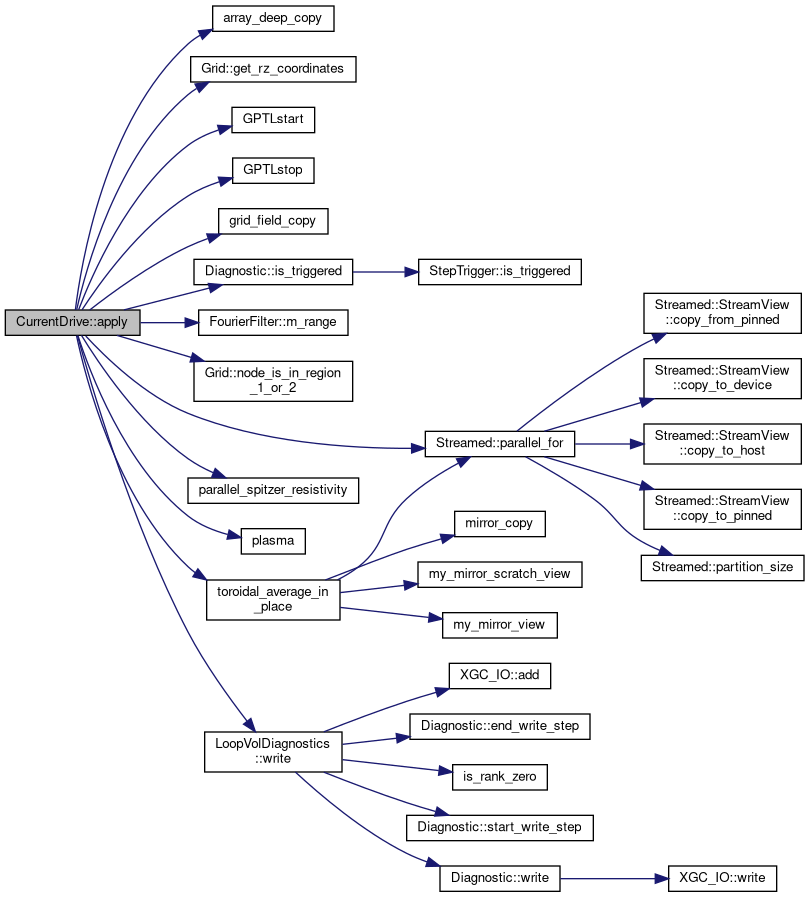
| void | apply (const Grid< DeviceType > &grid, Plasma &plasma, Smoothing &smoothing, const Moments &f0_moments, const DomainDecomposition< DeviceType > &pol_decomp, const MagneticField< DeviceType > &magnetic_field, const GridField< HostType, VarType::Scalar, PhiInterpType::None, TorType::OnePlane, KinType::DriftKin > &loop_voltage_h, LoopVolDiagnostics &loop_vol_diag, int gstep, double time) |
| |
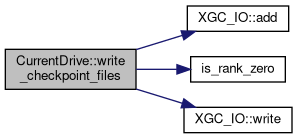
| void | write_checkpoint_files (const XGC_IO_Stream &stream) const |
| |
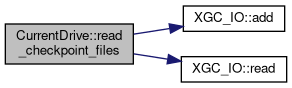
| void | read_checkpoint_files (const XGC_IO_Stream &stream) const |
| |
| bool | is_triggered (int step) |
| |
|
| GridField< HostType, VarType::Scalar, PhiInterpType::None, TorType::OnePlane, KinType::DriftKin > | jpara_diff_previous_h |
| |
| GridField< HostType, VarType::Scalar, PhiInterpType::None, TorType::OnePlane, KinType::DriftKin > | jpara_diff_integral_h |
| |
| View< double *, CLayout, HostType > | jpar0_h |
| |
| double | loop_voltage_psimax |
| | Inductive current drive: outer boundary (in pol. flux) of the loop voltage. More...
|
| |
| bool | loop_voltage_fsa |
| | Make loop voltage and current drive flux-functions if true (default: true) More...
|
| |
| double | current_drive_p |
| | Current drive PID controller: factor for proportional controller ( \(P\)) More...
|
| |
| double | current_drive_i |
| | Current drive PID controller: factor for integral controller ( \(I\)) More...
|
| |
| double | current_drive_d |
| | Current drive PID controller: factor for derivative controller ( \(D\)) More...
|
| |
| StepTrigger | step_trigger |
| |
◆ CurrentDrive() [1/2]
| CurrentDrive::CurrentDrive |
( |
| ) |
|
|
inline |
◆ CurrentDrive() [2/2]
◆ apply()
| void CurrentDrive::apply |
( |
const Grid< DeviceType > & |
grid, |
|
|
Plasma & |
plasma, |
|
|
Smoothing & |
smoothing, |
|
|
const Moments & |
f0_moments, |
|
|
const DomainDecomposition< DeviceType > & |
pol_decomp, |
|
|
const MagneticField< DeviceType > & |
magnetic_field, |
|
|
const GridField< HostType, VarType::Scalar, PhiInterpType::None, TorType::OnePlane, KinType::DriftKin > & |
loop_voltage_h, |
|
|
LoopVolDiagnostics & |
loop_vol_diag, |
|
|
int |
gstep, |
|
|
double |
time |
|
) |
| |
Drives electron current such that the plasma current required by the Grad-Shafranov equilibrium magnetic field is maintained. The plasma current is \(j_{\parallel,0} = \hat{\boldsymbol{b}}\cdot\left(\nabla\times\boldsymbol{B}_0\right)/\mu_0 \), or \(j_{\parallel,0} = \sum_s (q_s n_s u_{\parallel,s}) \). Therefore, \(u_{\parallel,e}=j_{\parallel,0}-\sum_{ions}(q_s n_s u_{\parallel,s}) \). The actual electron flow is stored in f0_moments.u_local). Any difference between the targeted and actual flow is damped away with an exponential damping \(\partial u/\partial t = \gamma (u_{target}-u_{actual}) \).
- Parameters
-
◆ read_checkpoint_files()
| void CurrentDrive::read_checkpoint_files |
( |
const XGC_IO_Stream & |
stream | ) |
const |
◆ write_checkpoint_files()
| void CurrentDrive::write_checkpoint_files |
( |
const XGC_IO_Stream & |
stream | ) |
const |
◆ current_drive_d
| double CurrentDrive::current_drive_d |
Current drive PID controller: factor for derivative controller ( \(D\))
◆ current_drive_i
| double CurrentDrive::current_drive_i |
Current drive PID controller: factor for integral controller ( \(I\))
◆ current_drive_p
| double CurrentDrive::current_drive_p |
Current drive PID controller: factor for proportional controller ( \(P\))
◆ jpar0_h
◆ jpara_diff_integral_h
◆ jpara_diff_previous_h
◆ loop_voltage_fsa
| bool CurrentDrive::loop_voltage_fsa |
Make loop voltage and current drive flux-functions if true (default: true)
◆ loop_voltage_psimax
| double CurrentDrive::loop_voltage_psimax |
Inductive current drive: outer boundary (in pol. flux) of the loop voltage.
The documentation for this class was generated from the following files:
 Public Member Functions inherited from Source
Public Member Functions inherited from Source